import asyncio
import platform
from UAV.cameras.gst_cam import GSTCamera
from UAV.logging import LogLevels
from UAV.manager import Gui
from UAV.mavlink import CameraClient, CameraServer, MAVCom, mavlink, GimbalServerViewsheen
from UAV.utils import helpers
from UAV.utils.general import boot_time_str, toml_load, config_dir
# gst_utils.set_gst_debug_level(Gst.DebugLevel.FIXME)
async def main():
con1, con2 = "udpin:localhost:14445", "udpout:localhost:14445"
# con1, con2 = "/dev/ttyACM0", "/dev/ttyUSB1"
# con1, con2 = "/dev/ttyACM0", "/dev/ttyACM2"
# logger.disabled = True
print(f"{boot_time_str =}")
# with GstContext(loglevel=LogLevels.CRITICAL): # GST main loop in thread (to process messages and display errors)
# run both drone nd GCS MAV connections on this computer
with MAVCom(con1, source_system=111, loglevel=LogLevels.CRITICAL) as GCS_client: # This normally runs on GCS
with MAVCom(con2, source_system=222, loglevel=LogLevels.CRITICAL) as UAV_server: # This normally runs on drone
# add GCS manager
gcs: CameraClient = GCS_client.add_component(CameraClient(mav_type=mavlink.MAV_TYPE_GCS, source_component=11, loglevel=LogLevels.INFO))
server_config_dict = toml_load(config_dir() / f"test_server_config.toml")
print(server_config_dict)
# add 2 UAV cameras, This normally runs on drone
cam_0 = GSTCamera(server_config_dict, camera_dict=toml_load(config_dir() / "test_cam_0.toml"), loglevel=LogLevels.DEBUG)
cam_1 = GSTCamera(server_config_dict, camera_dict=toml_load(config_dir() / "test_cam_1.toml"), loglevel=LogLevels.DEBUG)
UAV_server.add_component(CameraServer(mav_type=mavlink.MAV_TYPE_CAMERA, source_component=mavlink.MAV_COMP_ID_CAMERA, camera=cam_0, loglevel=LogLevels.INFO))
UAV_server.add_component(CameraServer(mav_type=mavlink.MAV_TYPE_CAMERA, source_component=mavlink.MAV_COMP_ID_CAMERA2, camera=cam_1, loglevel=LogLevels.INFO))
# Wait till heartbeat found
ret = await gcs.wait_heartbeat(remote_mav_type=mavlink.MAV_TYPE_CAMERA, timeout=2)
print(f"Camera Heartbeat {ret = }")
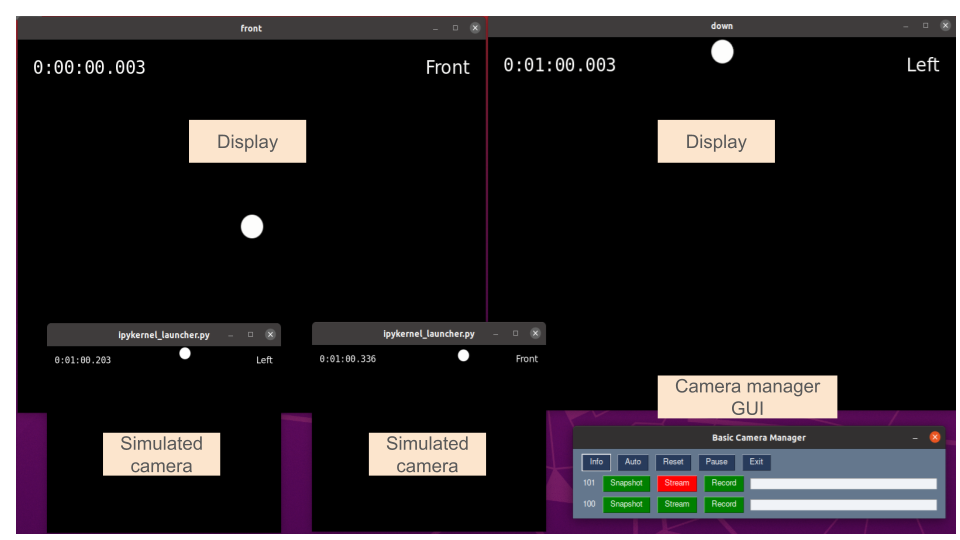
# Camera manager GUI
gui = Gui(camera_client=gcs, gimbal_client=None) # display GUI
t1 = asyncio.create_task(gui.find_cameras()) # find cameras from heartbeat info
t2 = asyncio.create_task(gui.run_gui())
await asyncio.gather(t1, t2)
# await asyncio.sleep(5)
# try:
# await asyncio.gather(t1, t3)
# except asyncio.CancelledError:
# print("CancelledError")
# pass
cam_0.close()
cam_1.close()
client_config_dict = toml_load(config_dir() / f"client_config.toml")
if platform.processor() != 'aarch64':
client_config_dict['camera_udp_decoder'] = 'h264' # on pc override as h264
p = helpers.start_displays(client_config_dict, display_type='cv2')
await main()
p.terminate()Found config directory at: /home/john/PycharmProjects/UAV/config
cv2_display udpsrc port={} ! application/x-rtp, media=(string)video, clock-rate=(int)90000, encoding-name=(string)H264, payload=(int)96 ! queue ! rtph264depay ! avdec_h264 ! videoconvert ! capsfilter caps=video/x-raw,format=BGR ! appsink name=mysink emit-signals=true sync=false
boot_time_str ='2024-01-24|10:21:20'
Found config directory at: /home/john/PycharmProjects/UAV/config
{'source_system': 222, 'camera_UDP_IP': '127.0.0.1', 'cam_0_UDP_port': 5000, 'cam_1_UDP_port': 5001, 'cam_10_UDP_port': 5010, 'usb_mount_command': 'udisksctl mount -b /dev/sda', 'image_save_path': '/media/{user}/jpgs', 'mavlink': {'source_system': 222, 'connection': '/dev/ttyUSB1'}}
Found config directory at: /home/john/PycharmProjects/UAV/config
John Doe
Found config directory at: /home/john/PycharmProjects/UAV/config
John Doe
Camera Heartbeat ret = (222, 100)
find_gimbals exit_event = <asyncio.locks.Event object at 0x7f6fe1d06200 [unset]>
Found Camera 222/101
Found Camera 222/100
run_gui exit
find_cameras exit TrueINFO |40.293| pygst.GstVideoS | gst_tools.:225 | MainThread | Process-2 | Starting GstVideoSource: udpsrc port=5000 ! application/x-rtp, media=(string)video, clock-rate=(int)90000, encoding-name=(string)H264, payload=(int)96 ! queue ! rtph264depay ! avdec_h264 ! videoconvert ! capsfilter caps=video/x-raw,format=BGR ! appsink name=mysink emit-signals=true sync=false
DEBUG|40.294| pygst.GstVideoS | gst_tools.:229 | MainThread | Process-2 | GstVideoSource Setting pipeline state to PLAYING ...
DEBUG|40.295| pygst.GstVideoS | gst_tools.:231 | MainThread | Process-2 | GstVideoSource Pipeline state set to PLAYING
INFO |40.298| pygst.GstVideoS | gst_tools.:225 | MainThread | Process-2 | Starting GstVideoSource: udpsrc port=5001 ! application/x-rtp, media=(string)video, clock-rate=(int)90000, encoding-name=(string)H264, payload=(int)96 ! queue ! rtph264depay ! avdec_h264 ! videoconvert ! capsfilter caps=video/x-raw,format=BGR ! appsink name=mysink emit-signals=true sync=false
DEBUG|40.299| pygst.GstVideoS | gst_tools.:229 | MainThread | Process-2 | GstVideoSource Setting pipeline state to PLAYING ...
DEBUG|40.299| pygst.GstVideoS | gst_tools.:231 | MainThread | Process-2 | GstVideoSource Pipeline state set to PLAYING
INFO |40.359| mavcom.CameraCl | basecompon:123 | MainThread | MainProces | Component Started self.source_component = 11, self.mav_type = 6, self.source_system = 111
INFO |40.361| uav.GSTCamera | gst_cam.py:354 | MainThread | MainProces | GSTCamera Started
INFO |40.361| uav.GSTCamera | gst_cam.py:580 | MainThread | MainProces | Setting camera_UDP_IP = 127.0.0.1
INFO |40.362| uav.GSTCamera | gst_cam.py:580 | MainThread | MainProces | Setting cam_0_UDP_port = 5000
INFO |40.374| pygst.GstPipeli | gst_tools.:225 | MainThread | MainProces | Starting GstPipeline: videotestsrc pattern=ball is-live=true ! timeoverlay ! textoverlay text="Front" valignment=top halignment=right font-desc="Sans, 18" shaded-background=true ! capsfilter caps=video/x-raw,format=RGB,width=800,height=600,framerate=30/1 ! tee name=t t. ! queue ! videoscale ! capsfilter caps=video/x-raw,format=RGB,width=400,height=300 ! videoconvert ! autovideosink t. ! interpipesink name=cam_0
DEBUG|40.375| pygst.GstPipeli | gst_tools.:229 | MainThread | MainProces | GstPipeline Setting pipeline state to PLAYING ...
DEBUG|40.375| pygst.GstPipeli | gst_tools.:231 | MainThread | MainProces | GstPipeline Pipeline state set to PLAYING
INFO |40.377| pygst.GstStream | gst_tools.:225 | MainThread | MainProces | Starting GstStreamUDP: interpipesrc listen-to=cam_0 is-live=true allow-renegotiation=true format=time ! valve name=myvalve drop=False ! queue ! videorate drop-only=true skip-to-first=true ! video/x-raw,framerate=2/1 ! videoconvert ! x264enc tune=zerolatency noise-reduction=10000 bitrate=2048 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000 sync=true
DEBUG|40.377| pygst.GstStream | gst_tools.:229 | MainThread | MainProces | GstStreamUDP Setting pipeline state to PLAYING ...
DEBUG|40.378| pygst.GstStream | gst_tools.:231 | MainThread | MainProces | GstStreamUDP Pipeline state set to PLAYING
INFO |40.379| uav.GSTCamera | gst_cam.py:748 | MainThread | MainProces | Video streaming pipeline "gstreamer_udpsink" created on port 5000
DEBUG|40.479| pygst.GstStream | gst_tools.:265 | MainThread | MainProces | Valve "myvalve" state set to True
INFO |40.480| uav.GSTCamera | gst_cam.py:764 | MainThread | MainProces | Video streaming "gstreamer_udpsink" stopped (paused) on port 5000
INFO |40.482| uav.GSTCamera | gst_cam.py:354 | MainThread | MainProces | GSTCamera Started
INFO |40.483| uav.GSTCamera | gst_cam.py:580 | MainThread | MainProces | Setting camera_UDP_IP = 127.0.0.1
INFO |40.483| uav.GSTCamera | gst_cam.py:580 | MainThread | MainProces | Setting cam_1_UDP_port = 5001
INFO |40.497| pygst.GstPipeli | gst_tools.:225 | MainThread | MainProces | Starting GstPipeline: videotestsrc pattern=ball is-live=true ! timeoverlay ! textoverlay text="Left" valignment=top halignment=right font-desc="Sans, 18" shaded-background=true ! capsfilter caps=video/x-raw,format=RGB,width=800,height=600,framerate=30/1 ! tee name=t t. ! queue ! videoscale ! capsfilter caps=video/x-raw,format=RGB,width=400,height=300 ! videoconvert ! autovideosink t. ! interpipesink name=cam_1
DEBUG|40.498| pygst.GstPipeli | gst_tools.:229 | MainThread | MainProces | GstPipeline Setting pipeline state to PLAYING ...
DEBUG|40.498| pygst.GstPipeli | gst_tools.:231 | MainThread | MainProces | GstPipeline Pipeline state set to PLAYING
INFO |40.500| pygst.GstStream | gst_tools.:225 | MainThread | MainProces | Starting GstStreamUDP: interpipesrc listen-to=cam_1 is-live=true allow-renegotiation=true format=time ! valve name=myvalve drop=False ! queue ! videorate drop-only=true skip-to-first=true ! video/x-raw,framerate=2/1 ! videoconvert ! x264enc tune=zerolatency noise-reduction=10000 bitrate=2048 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5001 sync=true
DEBUG|40.500| pygst.GstStream | gst_tools.:229 | MainThread | MainProces | GstStreamUDP Setting pipeline state to PLAYING ...
DEBUG|40.501| pygst.GstStream | gst_tools.:231 | MainThread | MainProces | GstStreamUDP Pipeline state set to PLAYING
INFO |40.502| uav.GSTCamera | gst_cam.py:748 | MainThread | MainProces | Video streaming pipeline "gstreamer_udpsink" created on port 5001
DEBUG|40.602| pygst.GstStream | gst_tools.:265 | MainThread | MainProces | Valve "myvalve" state set to True
INFO |40.603| uav.GSTCamera | gst_cam.py:764 | MainThread | MainProces | Video streaming "gstreamer_udpsink" stopped (paused) on port 5001
INFO |40.604| mavcom.CameraSe | basecompon:123 | MainThread | MainProces | Component Started self.source_component = 100, self.mav_type = 30, self.source_system = 222
INFO |40.605| mavcom.CameraSe | basecompon:123 | MainThread | MainProces | Component Started self.source_component = 101, self.mav_type = 30, self.source_system = 222
WARNI|40.606| root | asyncio_gu:271 | MainThread | MainProces | Gui auto is not callable
WARNI|40.607| root | asyncio_gu:273 | MainThread | MainProces | Gui reset is not callable
WARNI|40.607| root | asyncio_gu:275 | MainThread | MainProces | Gui pause is not callable
DEBUG|43.667| pygst.GstPipeli | gst_tools.:294 | MainThread | MainProces | GstPipeline Stopping pipeline ...
DEBUG|43.669| pygst.GstPipeli | gst_tools.:298 | MainThread | MainProces | GstPipeline Sending EOS event ...
DEBUG|43.771| pygst.GstPipeli | gst_tools.:315 | MainThread | MainProces | GstPipeline Reseting pipeline state ....
DEBUG|43.814| pygst.GstPipeli | gst_tools.:322 | MainThread | MainProces | GstPipeline Gst.Pipeline successfully destroyed
INFO |43.815| pygst.GstPipeli | gst_tools.:335 | MainThread | MainProces | GstPipeline Shutdown
INFO |43.817| uav.GSTCamera | gst_cam.py:516 | MainThread | MainProces | GSTCamera closed
DEBUG|43.987| pygst.GstStream | gst_tools.:967 | Thread-22 | MainProces | Sending EOS event, to trigger shutdown of pipeline
INFO |43.989| pygst.GstStream | gst_tools.:335 | MainThread | MainProces | GstStreamUDP Shutdown
INFO |43.990| uav.GSTCamera | gst_cam.py:803 | MainThread | MainProces | !!!!!! Closed "gstreamer_udpsink"
DEBUG|43.991| pygst.GstPipeli | gst_tools.:294 | MainThread | MainProces | GstPipeline Stopping pipeline ...
DEBUG|43.992| pygst.GstPipeli | gst_tools.:298 | MainThread | MainProces | GstPipeline Sending EOS event ...
DEBUG|44.094| pygst.GstPipeli | gst_tools.:315 | MainThread | MainProces | GstPipeline Reseting pipeline state ....
DEBUG|44.110| pygst.GstPipeli | gst_tools.:322 | MainThread | MainProces | GstPipeline Gst.Pipeline successfully destroyed
INFO |44.111| pygst.GstPipeli | gst_tools.:335 | MainThread | MainProces | GstPipeline Shutdown
INFO |44.112| uav.GSTCamera | gst_cam.py:516 | MainThread | MainProces | GSTCamera closed
DEBUG|44.309| pygst.GstStream | gst_tools.:967 | Thread-23 | MainProces | Sending EOS event, to trigger shutdown of pipeline
INFO |44.311| pygst.GstStream | gst_tools.:335 | MainThread | MainProces | GstStreamUDP Shutdown
INFO |44.312| uav.GSTCamera | gst_cam.py:803 | MainThread | MainProces | !!!!!! Closed "gstreamer_udpsink"
INFO |44.363| pygst.GstPipeli | gst_tools.:335 | MainThread | MainProces | GstPipeline Shutdown
INFO |44.364| uav.GSTCamera | gst_cam.py:516 | MainThread | MainProces | GSTCamera closed
INFO |44.465| pygst.GstStream | gst_tools.:335 | MainThread | MainProces | GstStreamUDP Shutdown
INFO |44.466| uav.GSTCamera | gst_cam.py:803 | MainThread | MainProces | !!!!!! Closed "gstreamer_udpsink"
INFO |44.467| mavcom.CameraSe | basecompon:417 | MainThread | MainProces | CameraServer closed (not waiting for _t_heartbeat daemon thread)
INFO |44.469| pygst.GstPipeli | gst_tools.:335 | MainThread | MainProces | GstPipeline Shutdown
INFO |44.470| uav.GSTCamera | gst_cam.py:516 | MainThread | MainProces | GSTCamera closed
INFO |44.571| pygst.GstStream | gst_tools.:335 | MainThread | MainProces | GstStreamUDP Shutdown
INFO |44.573| uav.GSTCamera | gst_cam.py:803 | MainThread | MainProces | !!!!!! Closed "gstreamer_udpsink"
INFO |44.574| mavcom.CameraSe | basecompon:417 | MainThread | MainProces | CameraServer closed (not waiting for _t_heartbeat daemon thread)
INFO |44.611| mavcom.CameraCl | basecompon:417 | MainThread | MainProces | CameraClient closed (not waiting for _t_heartbeat daemon thread)